



 通过认证
通过认证 










1. 产品简介:
在农业机器人中,果蔬采摘机器人是复合型机器人,融合人工智能和多传感器技术,采用基于深度学习的视觉算法,引导机械手臂完成识别、定位、抓取、切割、放置任务的高度协同自动化系统,采摘成功率可达90%以上,可解决自然条件下的果蔬选择性收获难题,是智慧农业的标志性产品。
果蔬采摘机器人由行走系统、视觉系统和采摘执行系统组成。行走系统结合路面情况,选取履带式、轮式或轨道式等行走机构满足多种应用场景,采用视觉、激光、磁导航和SLAM算法,集合超声、红外和激光等多种传感器,使其更能适应田间多种环境。视觉系统采用双目立体视觉定位技术,实现对果蔬大小、颜色、形状、成熟度和采摘位置的信息获取及处理;采摘执行系统采用多自由度机械手臂,通过合理的路径规划,完成抓取、采摘和放篮等多种任务。
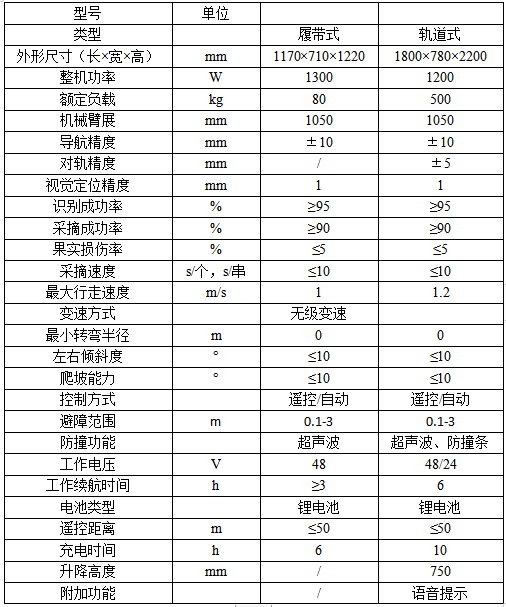
2、参数指标
3.功能特点
1) 果实精准采收
双目立体视觉精准判别可采摘果蔬的大小、颜色、形状、成熟度和采摘位置定位;
轻巧型多自由度机械臂,轻松完成路径规划、采摘和放篮多个任务;
柔性采摘手通过自适应控制完成果蔬采摘位置抓取,不伤果;
按照作物商品性特点,采用按个、按串或采收包装一体化等多种采收方式。
2) 环境智能感知与自主避障
环360°雷达通过不间断扫描,可预先探测作业环境和障碍物信息,并根据所处环境及时调整行走策略,实现自主避障。
3) 多地形作业与导航
针对农业地形和材质的多样性,提供履带式、轮式或轨道式多种行走系统和驱动方式满足不同场景要求;
搭载视觉、激光或磁感应传感器完成路径规划和导航;
辅以动力匹配、结构优化,轻松完成爬坡越障。
4) 智能充电系统
机器人与不少于70Ah的智能电池搭配使用,连续运行时间达3小时;
抽屉式安装使电池内嵌在机器人内部,输出线材进行增强防护和锁扣式连接,提升了安全性和更换方便性;
电池强化了自均衡性,输出电压稳定一致,寿命长久;
结合室内定位系统,可以实现自主充电等功能扩展。
5) 农机农艺融合新模式
围绕选择性收获,结合作物品种,栽培模式和机器人的交互方式,构建针对作物的智慧栽培系统
4、标准配置
配置:履带式行走底盘、机械臂、双目视觉系统、采摘机械手、遥控器
5、丰富配件(单独选购)
超声避障系统;视觉导航;室内定位系统;激光导航;语音交互;柔性采摘机械手;自动充电系统;远程监控系统;可选择轮式或轨道式行走底盘。
6、适应场景
标配型:现代农业园区或科技农业园区、标准化温室种植、农业培训类机构、农业嘉年华类活动。
增配型:科技场馆、涉农大中专及以上院校及科研院所。(开放接口、教学大纲、教学课程、实验教程等收费不含在标配价格中)
在农业机器人中,果蔬采摘机器人是复合型机器人,融合人工智能和多传感器技术,采用基于深度学习的视觉算法,引导机械手臂完成识别、定位、抓取、切割、放置任务的高度协同自动化系统,采摘成功率可达90%以上,可解决自然条件下的果蔬选择性收获难题,是智慧农业的标志性产品。
果蔬采摘机器人由行走系统、视觉系统和采摘执行系统组成。行走系统结合路面情况,选取履带式、轮式或轨道式等行走机构满足多种应用场景,采用视觉、激光、磁导航和SLAM算法,集合超声、红外和激光等多种传感器,使其更能适应田间多种环境。视觉系统采用双目立体视觉定位技术,实现对果蔬大小、颜色、形状、成熟度和采摘位置的信息获取及处理;采摘执行系统采用多自由度机械手臂,通过合理的路径规划,完成抓取、采摘和放篮等多种任务。
2、参数指标
3.功能特点
1) 果实精准采收
双目立体视觉精准判别可采摘果蔬的大小、颜色、形状、成熟度和采摘位置定位;
轻巧型多自由度机械臂,轻松完成路径规划、采摘和放篮多个任务;
柔性采摘手通过自适应控制完成果蔬采摘位置抓取,不伤果;
按照作物商品性特点,采用按个、按串或采收包装一体化等多种采收方式。
2) 环境智能感知与自主避障
环360°雷达通过不间断扫描,可预先探测作业环境和障碍物信息,并根据所处环境及时调整行走策略,实现自主避障。
3) 多地形作业与导航
针对农业地形和材质的多样性,提供履带式、轮式或轨道式多种行走系统和驱动方式满足不同场景要求;
搭载视觉、激光或磁感应传感器完成路径规划和导航;
辅以动力匹配、结构优化,轻松完成爬坡越障。
4) 智能充电系统
机器人与不少于70Ah的智能电池搭配使用,连续运行时间达3小时;
抽屉式安装使电池内嵌在机器人内部,输出线材进行增强防护和锁扣式连接,提升了安全性和更换方便性;
电池强化了自均衡性,输出电压稳定一致,寿命长久;
结合室内定位系统,可以实现自主充电等功能扩展。
5) 农机农艺融合新模式
围绕选择性收获,结合作物品种,栽培模式和机器人的交互方式,构建针对作物的智慧栽培系统
4、标准配置
配置:履带式行走底盘、机械臂、双目视觉系统、采摘机械手、遥控器
5、丰富配件(单独选购)
超声避障系统;视觉导航;室内定位系统;激光导航;语音交互;柔性采摘机械手;自动充电系统;远程监控系统;可选择轮式或轨道式行走底盘。
6、适应场景
标配型:现代农业园区或科技农业园区、标准化温室种植、农业培训类机构、农业嘉年华类活动。
增配型:科技场馆、涉农大中专及以上院校及科研院所。(开放接口、教学大纲、教学课程、实验教程等收费不含在标配价格中)





