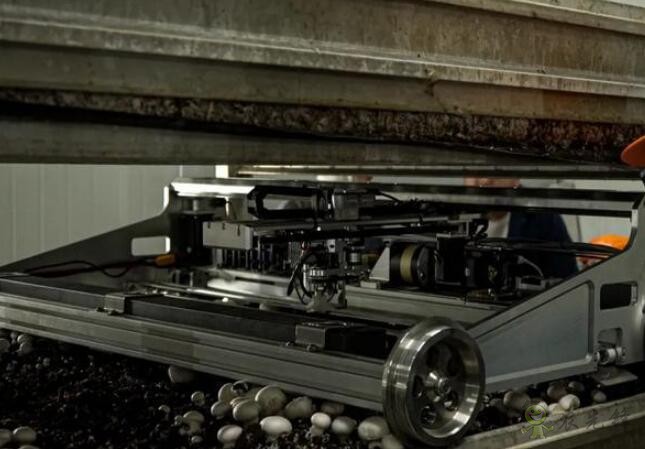

机器人不仅可以获得下面的蘑菇床和蘑菇的彩色图像通过上面的摄像头和内部中央控制系统,而且获得的深度和距离的蘑菇。通过图像处理,计算蘑菇的三维空间坐标,定位蘑菇的位置。一旦将相关信息反馈给机械手,机械手就可以移动到合适的位置,达到相应的高度。用机械臂下的吸盘“吮吸”蘑菇,然后输送到传送带。

这是智能拣选机器人1.0版。这也是首次将自主研发的智能采摘机器人带到蘑菇屋进行田间采摘操作测试。接下来,研发团队将根据测试情况对机器人进行进一步的改进和完善,力争尽快满足企业的智能拣选需求。

0评论2024-08-23

0评论2023-10-12

0评论2023-09-04

0评论2023-05-09

0评论2023-03-29

0评论2023-03-27
0评论2023-02-15588

0评论2023-02-09

0评论2023-02-01