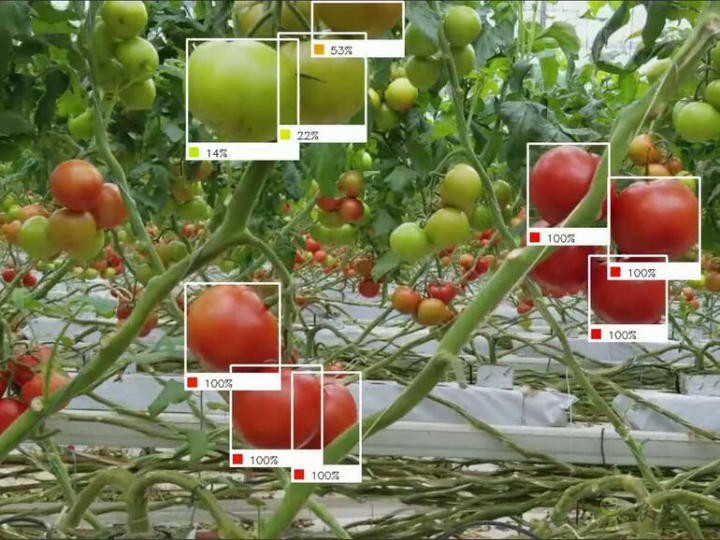
Root AI首席执行官莱辛表示:我们需要超越计算机视觉在三维空间中寻找果实的能力,我们做到了。最重要的是,我们有一层计算机感知能力,它能计划机器人如何去抓取果实、如何在环境中导航,然后将“手指”放在目标上进行有效地摘取。

无论是树上的苹果还是灌木丛中的草莓,从识别、规划和采摘的角度来看,都是类似的挑战。机器人的夹持器和软件可以根据不同作物调换,然而,围绕规划和采摘的基本原则才是作物应用的基础。


0评论2024-08-23

0评论2023-10-12

0评论2023-09-04

0评论2023-05-09

0评论2023-03-29

0评论2023-03-27
0评论2023-02-15588

0评论2023-02-09

0评论2023-02-01